Helicopter > Helicopter with Flettner double rotor
K-Max Trainer Dragon
K-Max Trainer "Dragon"
From March 2023 we will again offer the K-Max trainer "Dragon" with the Flettner double rotor system.
This trainer version has the advantage that, if necessary, all mechanical, electronic and drive turbine components can be accessed optimally.
The trainer version is offered with a rotor diameter of 2.45 m.
The mechanics of the K-Max trainer "Dragon" can later be integrated into the fuselage of the K-Max 1200 without any problems. Depending on the selected rotor diameter, the drive reduction must be adjusted for this.
Further technical data and details see below.

Kit mechanics and trainer "Dragon"
- Flettner-Mechanics, prepared for Jakadofsky PRO-6000 or PRO-7000, kit: 3.995,- Eur
- alternatively: elektro Flettner mechanics, prepared for Hacker Q80: 3.995,- Eur
- Trainer "Dragon" for the above mechanics, consisting of chassis and aluminum landing gear (welded), trainer canopy (carbon), 2 x 1 liter tank, hopper tank, rear with tail units and brace (completely in aluminium/carbon) and RC boards (carbon) for installing the complete RC- and turbine electronics: 1.695,- EUR
- Microprocessor mixer electronics for controlling the two swash plates in the model (required to operate the model): 380,- EUR
- Kit without turbine, RC electronics, rotor blades
- Rotor diameter 2.45 m
On request we can offer you the following components to complete the helicopter:
- Aluminum rotor blades 2.45 m, Viper-X76
- alternatively: rotor blades 2.45, carbon
- complete RC electronics
- Jakadofsky turbine PJW PRO-6000, PRO-7000, or alternatively: Hacker Q80 mit Regler and akkus
- complete assembly of the kit, the RC electronics and the turbine. On request up to the ready-to-fly model
From the beginning of spring 2026, the newly introduced tectronic-in-motion flight controller will also be available, for easier and safer flight operation of large RC-model helicopters.

Trainer model "Dragon". The helicopter mechanics can be supplied mounted in the trainer "Dragon" for easy operation

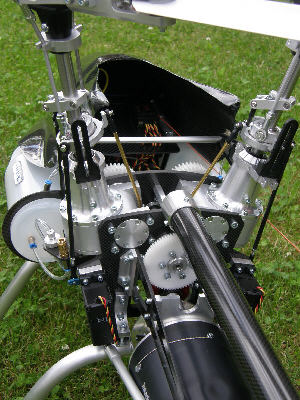
Rear view of the trainer helicopter "Dragon". You can see the two separately arranged reduction gears with the linkage of the two swash plates. In addition, the Jakadofsky turbine with the first gear stage

The above pictures were taken at the tandem- and experimental helicopter meeting in Stabio/Switzerland (photo provided by Raimund Zimmermann)
At this picture you can see very well the two counter-rotating meshing rotors
Here you can download a dimension sheet with the overall dimensions of the K-Max trainer "Dragon" in PDF format (4 pages, 954 kb)
Here you can download a data sheet of the K-Max trainer "Dragon" in PDF format, German/English (2 pages, 449 kb)
Here you can watch a video of the K-Max trainer "Dragon" (provided by www.youtube.com). The video shows the K-Max trainer at an air show in Stabio (CH)
Description of the Flettner mechanics "Dragon" as a trainer helicopter
As already described, the complex mechanics of the model helicopter were developed entirely using 3D software. This is the only way to achieve the greatest possible planning security right from the start. All components are then manufactured based on the derived drawings and fit and function as planned right from the start.
The narrow silhouette of the fuselage proved to be very problematic when converting the original into the model construction. For example, to implement the extremely narrow dome construction of the original, a special gear configuration was chosen.
About the drive: the PJW turbine "PRO 6000" located behind the mechanics transfers the power to the two main rotors via a 3-stage gearbox. The two rotors are coupled to each other via the middle pair of gears and are decoupled from the drive via a freewheel during autorotation.
In addition to the PJW turbines from Jakadofsky, an electric version with the Q80 from Hacker is planned.
The PJW turbine sits at the same height as the original K-Max 1200. A prototypical exhaust system is offered to extend the exhaust pipe.
As usual, the entire mechanics is precision CNC-manufactured (aluminium 7076-T6, all parts are black anodized). The RC board, the trainer's canopy, the complete rear and many other parts are made of Carbon.
Technical description:
- counter-rotating, intermeshing 2-blade double rotor system based on the Flettner principle
- very compact mechanics
- all CNC parts are made of aerospace aluminum (EN AW-7075 T6, black anodized) and carbon
- 3-stage reduction gear (or 2-stage with electromechanics), last stage running in an oil bath (completely encapsulated)
- linkage of the two swashplates via 3 servos each, free of play 120° linkage
- all ball heads on the two swash plates and rotor heads are made of steel
- more than 40 bearings installed
- rotor shaft diameter 15 mm
- swashplate driver with full ball bearings
- blade bearing shaft diameter 12 mm
- rotor blade connection dimension 22 mm, 6 mm bore
- industrial quality finish
- detailed assembly and adjustment instructions
- assembly kit, assemblies that are difficult to assemble are supplied pre-assembled
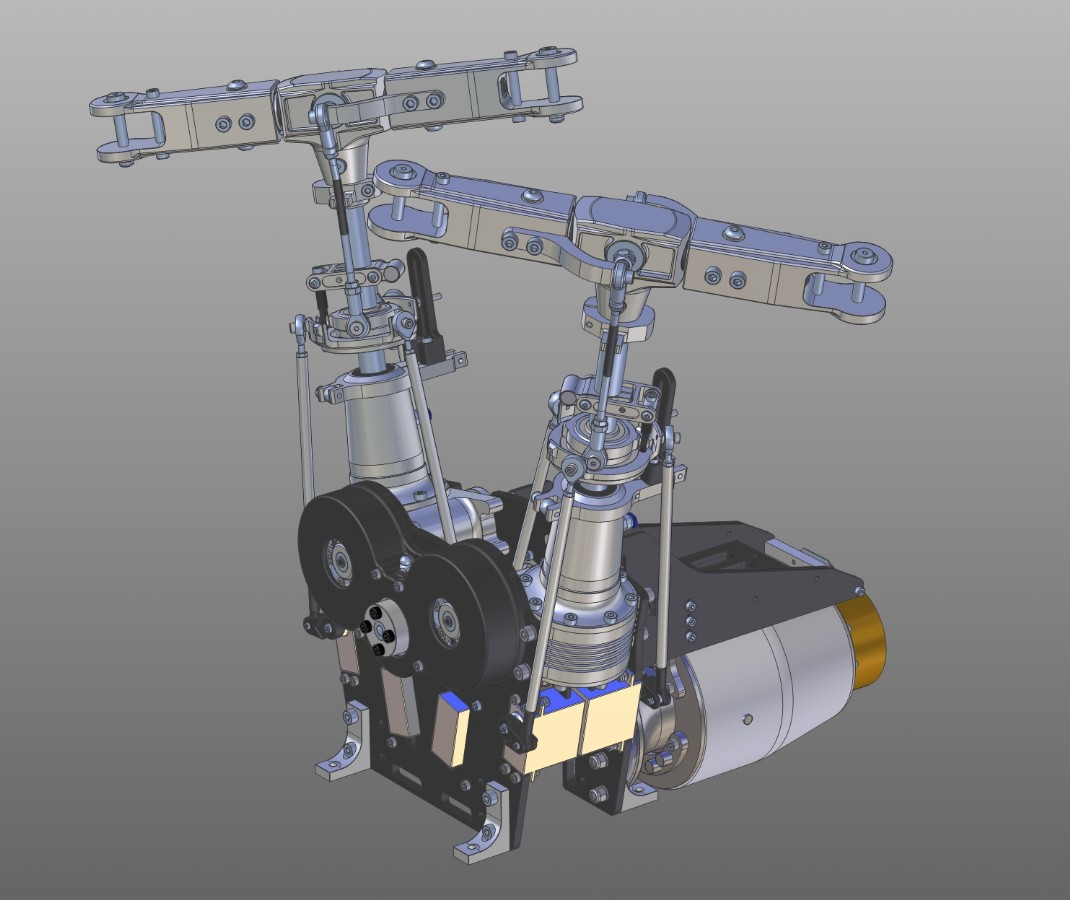
View of the mechanics with the Jakadofsky PRO-6000 turbine
Elektronic mixer for the trainer model Dragon
A special mixer electronics is required to control the two swash plates, which we also offer as an accessory. This electronics is connected in the model between the receiver and the swash plate servos. The advantages of such electronics are that important parameters can be changed quickly by changing the software. An associated programming module can be connected to the electronics in the model via a network cable. This can then be used to adjust all parameters in the workshop or on the airfield.
The model helicopter can be controlled like any other helicopter. Any normal remote control transmitter can be used as a transmitter without special mixers on the transmitter side.
A 3-axis flybarless system can also be easily integrated, see below.
The following functions are supported by the mixer electronics:
Processing of the signals for collectiv, roll, pitch and yaw from the receiver to control the two swashplates with 3 high-performance servos per swashplate, i.e. a total of 6 servos to control the two swashplates.
A stabilization system (e.g. Heli Command, V-Stabi, Beast-X etc.) or individual gyro systems (e.g. GY-401) for individual axes can also be looped in between the receiver outputs and the mixer electronics.
Alternatively, a Pixhawk 4 can also be used in the future. The special programming required to control the two swashplates is in preparation
Reprint only with permission of the author. All statements without guarantee.