Helicopter > Kamov Ka-52
Entwicklung und Beschreibung Koaxialrotor-Mechanik Kamov Ka-52


Beschreibung der Mechanik:
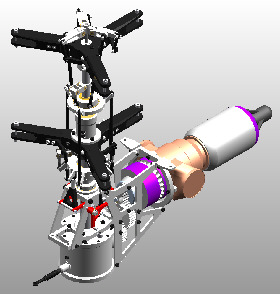
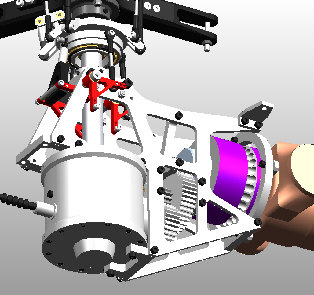
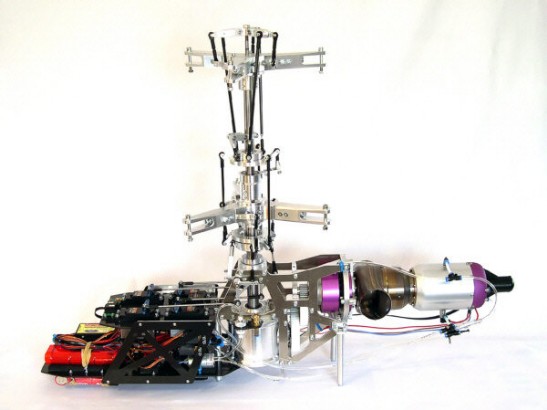
Der Benzinmotor ZG45 treibt über ein zweistufiges Zahnradgetriebe (Modul 1,5) die beiden gegenläufigen Rotorwellen mit den beiden Rotoren an. Die innere Rotorwelle ist eine hohlgebohrte Welle mit einem Außendurchmesser von 15 mm. Die Äußere Rotorwelle ist als Rohr-Rotorwelle mit einem Außendurchmesser von 20 mm ausgeführt. Die Innenwelle ist hohl gebohrt, weil hierin die Gieranlenkung zur Verstellung des oberen Rotorkopfes geführt wird. Die Gegenläufigkeit der beiden Rotoren wird durch drei Stück spiralverzahnte Kegelzahnräder erreicht, die im Ölbad laufen. Der ZG45 bzw. ZG62 wird durch ein Radiallüfterrad gekühlt. Zum einfacheren Start des Motors ist ein Elektrostarter integriert. Ein Freilaufsystem entkoppelt den Starter nach dem Anlaufen des Benzinmotors.
Rotoransteuerung:
Zyklische Ansteuerung:
Beide Rotoren besitzen jeweils eine Taumelscheibe zur Ansteuerung der jeweils drei. Rotorblätter. Die Ansteuerung der unteren Rotorblätter erfolgt direkt über den TS-Aussenring der unteren TS. Die Ansteuerung der oberen Rotorblätter erfolgt indirekt über die obere Taumelscheibe und die oberhalb des oberen Rotorkopfes angeordneten Mischhebel. Bei zyklischer Ansteuerung der unteren TS wird die obere TS gleichsinnig direkt mit angelenkt. Durch geschickte Auswahl der Taumelscheibendurchmesser und Mischhebelparameter haben das obere und untere Rotorsystem gleiche zyklische Ausschläge.
Kollektiv-Pitch:
Die Pitch-Steuerung erfolgt an beiden Taumelscheiben gleichsinnig. Durch heben/senken der unteren TS wird die obere TS direkt mit angesteuert. Durch die vorgenannten Mischhebel erfolgt am oberen Rotorkopf jedoch ein größerer Ausschlag an den Rotorkopfblatthaltern. Hierdurch entsteht ein Giermoment auf den Hubschrauber, welches durch ein senderseitige statische "Heckrotor"-Beimischung in Verbindung mit einem Gierkreisel ausgeglichen wird.
Gier-Steuerung:
Die Giersteuerung des Rotorsystems erfolgt durch gegensinnige Pitch-Ansteuerung der beiden Rotorköpfe. An den beiden Rotoren entstehen unterschiedliche Auftriebswerte und damit Drehmomente welches das Gieren des Hubschrauber um die Hochachse bewirken. Der resultierende Auftrieb an beiden Rotoren bleibt gleich, so daß das Modell nicht gleichzeitig wegsteigt oder absinkt. Angesteuert wird die Giersteuerung (Heckrotorfunktion) durch axiales verstellen der Mischhebelbrücke, an denen wiederum die Mischhebel montiert sind. Durch die hohlgebohrte Innen-Rotorwelle wird die Mischhebelbrücke über eine Gleithülse/Umlenkhebel-Kombination durch das „Heckrotorservo“ angesteuert. Durch die vorgenannte Ansteuerung erfolgt direkt nur die Ansteuerung der Blatthalter des oberen Rotorkopfes. Gegensinnig dazu wird über eine senderseitige Beimischung eine Absenkung/Anhebung der unteren TS erreicht. Das hierdurch, wie bereits oben erwähnt, wiederum unterschiedlich große Ausschläge an den beiden Rotorköpfen enstehen, erleichtert die ganze Giersteuerung nicht unbedingt. Ein Leistungsfähiges und abgestimmtes Gyrosystem in Verbindung mit einem ausreichend schnellen und starken Digitalservo ist Voraussetzung für eine gute Heckstabilisierung.
Nachdruck nur mit Genehmigung des Autors. Alle Angaben ohne Gewähr.